注文していたマクロアダプターが追跡情報の更新がないまま届きました。13/21/31mmの3個がセットとなっています。左側がアダプター、右側がZWOのCCDカメラで、色が良く似ています。
本来、レンズとカメラボディの間に取り付けるアダプターなので、CCDカメラと接続するには工夫が必要です。13mmと21mmのアダプターを使って、CCDカメラと接続してみたところ、望遠端付近ではピントが出ました。広角側ではピントが出ませんでした。

強度などの問題があるかもしれませんが、3DプリンターでマクロアダプターとCCDカメラを接続するアダプターを作ってみました。2つのパーツで構成し、M3ネジで接続しています。CCDカメラとは3Dプリンターで作成したM42,0.75Pのネジで接続しています。CADソフトはホビー用途であれば無料で利用できるFusion360を使っています。


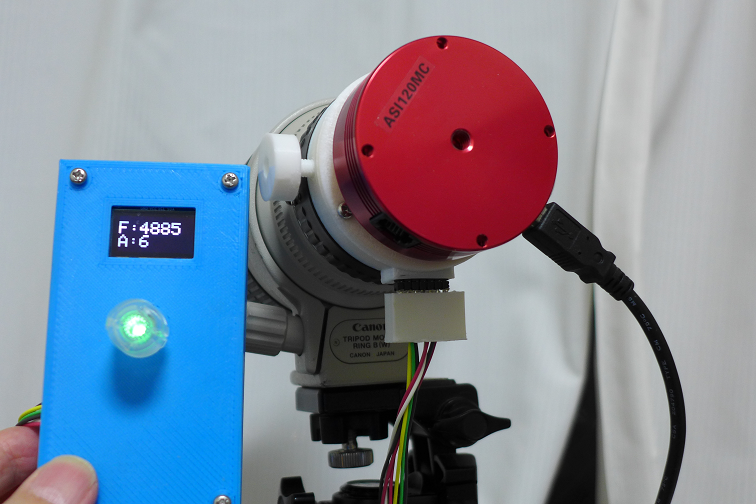
EFレンズに接続した様子と、フォーカスのハンド・コントローラ。
ソースコードの最新版は、こちら
組み立ててはみたものの、残念ながら動作が不安定です。今のところ、EF-S 18-55mmと同ISは、それなりに制御できますが、EF 35-80mmとEF70-200 1:28Lはまったく動きません。ロジックアナライザーでデコードしたSPIのデータ観測すると、どのレンズでも同じように見えるのですが、、、
本来、SPIの信号はボード内の短い距離の伝送用なので、コントローラの線が長すぎるのかもしれません。今後、配線の短縮またはバッファーやレベル変換を追加して、改善するかどうか確認したいと思っています。
(追記)ケーブルを約70cmから約25cmに変更したら、手持ちのレンズ全てが一応動くようになりました。ただし、まだ不安定な面もあるので、さらに短くする必要がありそうです。SPIの信号を生成するマイクロプロセッサー(Arduino nano)を、レンズに近接して配置できるよう取り付け方法の変更が必要かもしれません。この場合、ピントの調整を操作するSW付きのロータリーエンコーダの部分だけ、ケーブルで接続した別の箱に格納した方が良さそうです。