ArduinoでEFレンズを制御する実験のメモです。カメラレンズで星雲などを撮影しようとすると、手動でピントを合わせる必要がありますが、微妙な操作が必要でなかなかピントを合わせるのに苦労します。そこで、ステッピングモータでピントを調整しようと、3Dプリンターでこんなものを作ってみました。そうこうしているうちに、CANONのEFレンズをArduinoで制御できるらしいとの情報を得て、自分でも実験してみることに。

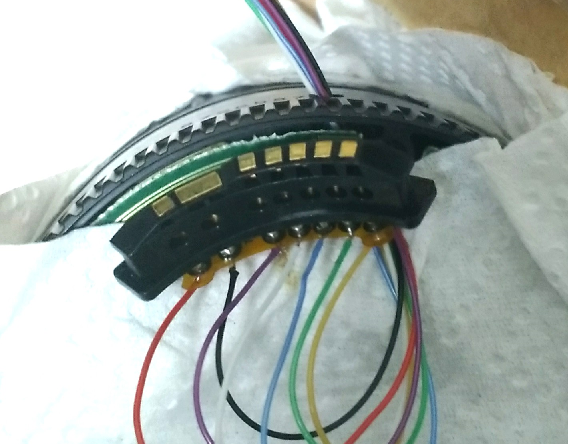
レンズの制御信号を取り出せるマウントアダプターを注文したのですが、到着にはしばらく時間がかかりそうなので、手持ちのカメラレンズ(EF-S 18-55mm USM)から信号を取り出すために、7本のリード線を半田づけします。(あくまでも自己責任で、、)
この作業には、こちらのリンクが非常に参考になりました。大型のレンズでは、レンズを駆動するモータ用として6Vの別電源が必要のようですが、実験に使ったレンズではロジック回路と同じ5Vで問題なく駆動できています。
主な材料
秋月の2色LED付きロータリーエンコーダ
OLED 128×64 I2C ディスプレイ
Arduino NANO
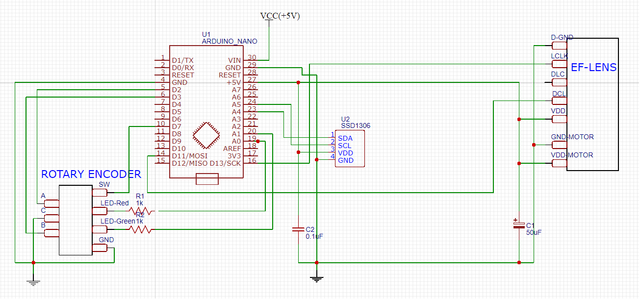
回路図
実験に使ったArduno NANOのスケッチ
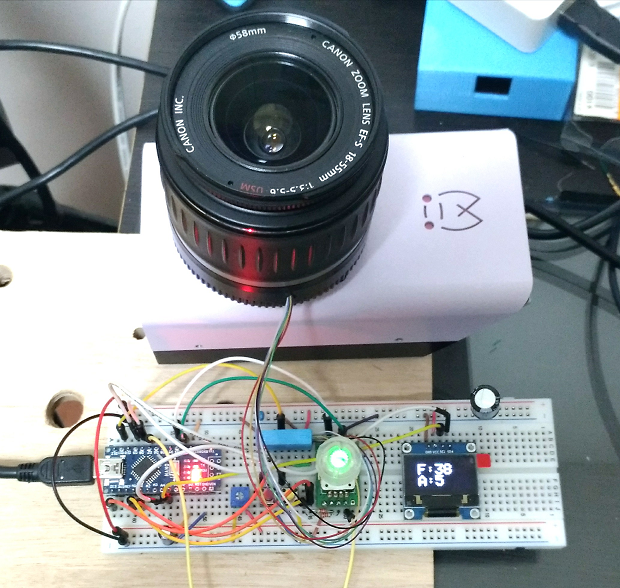
不用な変数などが残っていますが、とりあえず公開します。(実用化には、まだまだ課題が残っています。)制御の対象はフォーカスと絞りの2種類です。ロータリーエンコーダのSWの長押しで、赤と緑のLEDがトグルで点灯します。赤の点灯中にSWを押してフォーカスを変更し、緑のLED点灯中にSWを押すと絞り値を変更できます。
/*
ロータリーエンコーダの参照コード
https://jumbleat.com/2016/12/17/encoder_1/
*/
/*
EFレンズの制御関連参考リンク
ASCOM EF Lens Controller
http://www.indilib.org/media/kunena/attachments/3728/ascom_efEN.pdf
EFレンズから信号線の引き出の参照資料
How to Move Canon EF Lenses Yosuke Bando
http://web.media.mit.edu/~bandy/invariant/move_lens.pdf
Canon EFレンズのArduino制御
http://otobs.org/hiki/?EOS_model
Technical aspects of the Canon EF lens mount
http://www.eflens.com/lens_articles/ef_lens_mount.html
*/
#include <SPI.h>
#include <EEPROM.h>
#include <math.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Wire.h>
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1
//Adafruit_SSD1306 display(1);
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
#define RUN
#define LED_SW 7
#define ENC_A 2
#define ENC_B 3
#define LED_Red 14
#define LED_Green 15
volatile byte pos;
volatile int enc_count;
boolean sw = false;
int mode = 0;
int mode_counter[2];
int focuserPosition, targetPos, apValue, offset, apAddr, x, y;
String targetStr, apStr, gStr;
boolean IsMoving, IsFirstConnect;
char inStr[6];
void InitLens()
{
SPI.transfer(0x0A);
delay(30);
SPI.transfer(0x00);
delay(30);
SPI.transfer(0x0A);
delay(30);
SPI.transfer(0x00);
delay(30);
}
int ENC_COUNT(int incoming) {
static int enc_old = enc_count;
int val_change = enc_count - enc_old;
if (val_change != 0)
{
incoming += val_change;
enc_old = enc_count;
}
return incoming;
}
void ENC_READ() {
byte cur = (!digitalRead(ENC_B) << 1) + !digitalRead(ENC_A);
byte old = pos & B00000011;
byte dir = (pos & B00110000) >> 4;
if (cur == 3) cur = 2;
else if (cur == 2) cur = 3;
if (cur != old)
{
if (dir == 0)
{
if (cur == 1 || cur == 3) dir = cur;
} else {
if (cur == 0)
{
if (dir == 1 && old == 3) enc_count++;
else if (dir == 3 && old == 1) enc_count--;
dir = 0;
}
}
pos = (dir << 4) + (old << 2) + cur;
}
}
void setup() {
digitalWrite(13, LOW); // SPI Clock PIN
pinMode(ENC_A, INPUT_PULLUP);
pinMode(ENC_B, INPUT_PULLUP);
pinMode(LED_Red, OUTPUT);
pinMode(LED_Green, OUTPUT);
pinMode(LED_SW, INPUT_PULLUP);
// pinMode(MIN, INPUT_PULLUP);
// pinMode(MAX, INPUT_PULLUP);
attachInterrupt(0, ENC_READ, CHANGE);
attachInterrupt(1, ENC_READ, CHANGE);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
display.clearDisplay();
// テキストサイズを設定
display.setTextSize(3);
// テキスト色を設定
display.setTextColor(WHITE);
display.setCursor(0, 10);
display.println("EF-LensFocuser");
display.display();
delay(1000);
mode = 0;
apAddr = 0;
focuserPosition = 5000;
SPI.begin();
SPI.setBitOrder(MSBFIRST);
SPI.setClockDivider(SPI_CLOCK_DIV128);
SPI.setDataMode(SPI_MODE3);
digitalWrite(12, HIGH);
InitLens();
digitalWrite(LED_Red, HIGH);
digitalWrite(LED_Green, LOW);
apValue=EEPROM.read(apAddr);
Serial.begin(9600);
Serial.println(apValue);
// nothing to do inside the setup
}
void loop() {
int sw_count;
short counter_now;
sw_count = 0;
while (digitalRead(LED_SW) == LOW) {
sw_count++;
if (sw_count > 50) {
if (mode == 1) { // 新モードはフォーカス制御
digitalWrite(LED_Red, HIGH);
digitalWrite(LED_Green, LOW);
} else { // 新モードは絞り制御
digitalWrite(LED_Green, HIGH);
digitalWrite(LED_Red, LOW);
}
}
delay(10);
}
delay(100);
if (sw_count > 50) {
if (mode == 0) {
mode = 1; // 絞りモード
digitalWrite(LED_Green, HIGH);
digitalWrite(LED_Red, LOW);
} else {
mode = 0; // フォーカスモード
digitalWrite(LED_Red, HIGH);
digitalWrite(LED_Green, LOW);
}
}
if (sw_count != 0 && (sw_count < 50) ) {
if (mode == 0 ) { // Send command to LENS フォーカス
targetPos = mode_counter[mode] ;
offset = mode_counter[mode] ;
x = highByte(offset);
y = lowByte(offset);
InitLens();
IsMoving = true;
Serial.print(offset); Serial.print(",");
Serial.print(x); Serial.print(",");
Serial.println(y);
SPI.transfer(68); delay(30);
SPI.transfer(x); delay(30);
SPI.transfer(y); delay(30);
SPI.transfer(0); delay(100);
IsMoving = false;
focuserPosition = targetPos;
} else { // 絞り
apValue = mode_counter[mode] % 20;
if (apValue != EEPROM.read(apAddr))
{
InitLens();
Serial.println("AP");
SPI.transfer(0x07); delay(10);
SPI.transfer(0x13); delay(10);
SPI.transfer((apValue - EEPROM.read(apAddr)) * 3);
delay(100);
SPI.transfer(0x08); delay(10);
SPI.transfer(0x00); delay(10);
EEPROM.write(apAddr, apValue);
}
}
}
counter_now = ENC_COUNT(mode_counter[mode]);
if (mode_counter[mode] != counter_now)
{
mode_counter[mode] = counter_now;
}
disp_update();
}
void disp_update() {
display.clearDisplay();
display.setCursor(0, 10);
display.print(" F:");
display.println( mode_counter[0] );
display.print(" A:");
display.println(mode_counter[1]);
display.display();
}