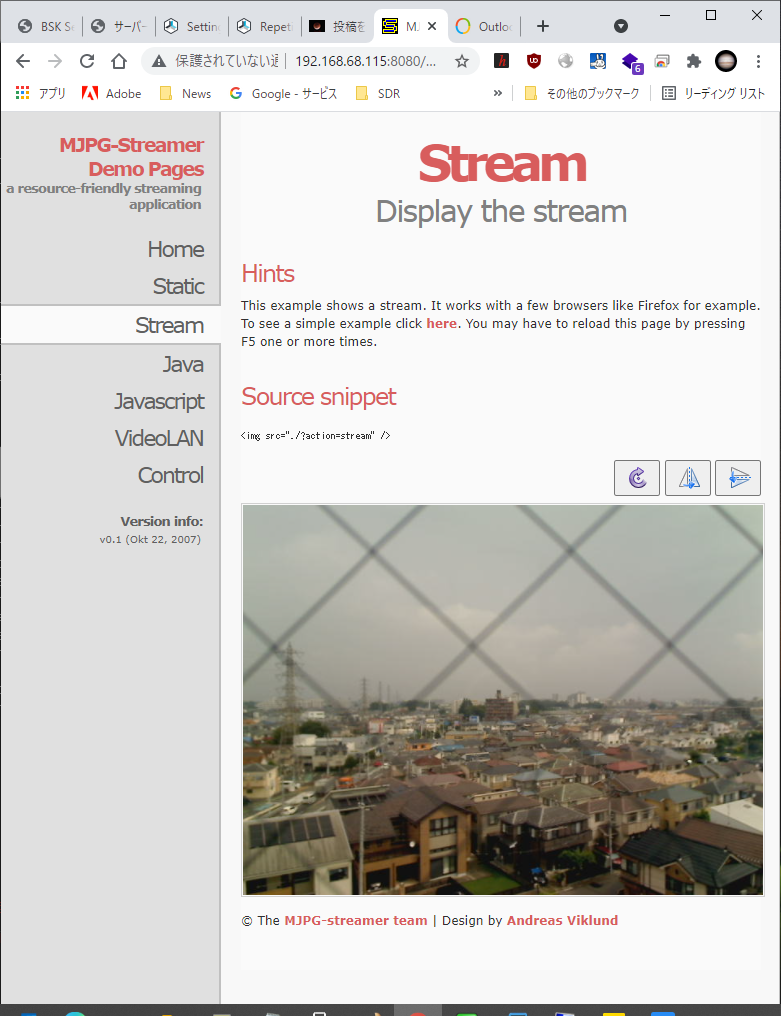
ATOMcam2をベランダへ設置し、RTSP で画像を流す。
処理は、Python(jupyter notebook)のスクリプト。cv2の中の移動検知のライブラリーを利用している。流星の他に、航空機、人工衛星、移動が激しい雲、鳥なども記録されるので、何らかの方法で、フィルタリングしたい。
とりあえず、一定のサイズ以下のファイルを削除するスクリプト(500kBの例)
find . -name "*.avi" -type 'f' -size -500k -deleteimport cv2
import numpy as np
import time
import datetime
import os
capture = cv2.VideoCapture('rtsp://4190:2712@192.168.68.74/live')
#capture=cv2.VideoCapture(0)
PATH="/media/mars/ff2880cc-1a99-40bd-88c1-5cdc86fe9eed/home/mars/DATA"
W = capture.get(cv2.CAP_PROP_FRAME_WIDTH)
H = capture.get(cv2.CAP_PROP_FRAME_HEIGHT)
W2=int(W/2)
H2=int(H/2)
fourcc = cv2.VideoWriter_fourcc(*"XVID")
print(W,H)
def key(k):
global th, tc,track,reverse
if k == ord('2'):
th = th - 1
elif k == ord('3'):
th = th + 1
elif k == ord('4'):
tc = tc -5
elif k == ord('5'):
tc = tc +5
elif k == ord('t'):
track = not track
elif k == ord('r'):
reverse = not reverse
fontFace =cv2.FONT_HERSHEY_SIMPLEX
track, reverse = False,False
avg=None
th = 10
tc = 25
x,y=0,0
writer = None
time_start = time.time()
frame=0
while(True):
ret, img = capture.read()
org = img.copy()
#img = cv2.resize(im, dsize=(W2, H2))
img=img[0:int(H*0.9),0:int(W)] # 映像の下側10%を検知範囲から除外。
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
if reverse:
gray=cv2.bitwise_not(gray)
avg=cv2.bitwise_not(avg)
if avg is None:
avg = gray.copy().astype("float")
continue
cv2.accumulateWeighted(gray, avg, 0.5)
frameDelta = cv2.absdiff(gray, cv2.convertScaleAbs(avg))
thresh = cv2.threshold(frameDelta, th, 255, cv2.THRESH_BINARY)[1]
contours,hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
detect=False
for i in range(0,len(contours)):
if len(contours[i]) > 0:
if cv2.contourArea(contours[i]) > tc:
detect=True
time_start = time.time()
if writer is None and track:
now=datetime.datetime.today()
date=now.strftime("%Y%m%d")
cDIR=PATH+'/'+date
if not(os.path.exists(cDIR)):
os.mkdir(cDIR)
fname=cDIR+'/'+'E-'+now.strftime("%Y%m%d_%H:%M:%S")+".avi"
writer = cv2.VideoWriter(fname, fourcc, 15, (int(W), int(H)))
rect = contours[i]
x, y, w, h = cv2.boundingRect(rect)
cv2.rectangle(img, (x-w, y-h), (x + w*2, y + h*2), (0, 0, 255), 2)
if time.time() - time_start > 5:
if writer is not None:
writer.release()
#f.close()
frame=0
writer = None
now=datetime.datetime.today()
text=now.strftime("%Y/%m/%d %H:%M:%S")+' No:'+str(frame)+ ' '+" TH:"+str(th)+" SZ:"+str(tc)
img = cv2.putText(img, text, (30,50), fontFace,1,color=(0, 255, 0))
org = cv2.putText(org, text, (30,50), fontFace,1,color=(0, 255, 0))
text1="REC:"+str(track) + " reverse:" + str(reverse)
if writer is not None:
frame=frame+1
text1=fname+' '+text1
img = cv2.putText(img, text1, (30,80), fontFace,1,color=(0, 255, 0))
#cv2.imshow('thresh-level',thresh)
cv2.imshow("IMAGE",img)
if writer is not None:
writer.write(org)
k=cv2.waitKey(1) & 0xFF
key(k)
if k== ord('q'):
break
capture.release()
if writer is not None:
writer.release()
cv2.destroyAllWindows()Thread機能を利用して、処理の効率化を図る。
import cv2
import threading
import queue
import numpy as np
import time
import datetime
import os
cPATH='rtsp://4190:2712@192.168.68.74/live'
#cPATH= 'rtsp://admin:@192.168.68.128:554/1/h264major'
PATH="/home/pi/DATA"
fourcc = cv2.VideoWriter_fourcc(*"XVID")
class ThreadingVideoCapture:
def __init__(self, src, max_queue_size=256):
self.video = cv2.VideoCapture(src)
self.q = queue.Queue(maxsize=max_queue_size)
self.stopped = False
def start(self):
thread = threading.Thread(target=self.update, daemon=True)
thread.start()
return self
def update(self):
while True:
if self.stopped:
return
if not self.q.full():
ok, frame = self.video.read()
self.q.put((ok, frame))
if not ok:
self.stop()
return
def read(self):
return self.q.get()
def stop(self):
self.stopped = True
def release(self):
self.stopped = True
self.video.release()
def isOpened(self):
return self.video.isOpened()
def get(self, i):
return self.video.get(i)
def key(k):
global th, tc,track,reverse,disp
if k == ord('2'):
th = th - 1
elif k == ord('3'):
th = th + 1
elif k == ord('4'):
tc = tc -5
elif k == ord('5'):
tc = tc +5
elif k == ord('t'):
track = not track
elif k == ord('d'):
disp= not disp
elif k == ord('r'):
reverse = not reverse
def detect_mov(contours,detect):
for i in range(0,len(contours)):
if len(contours[i]) > 0:
if cv2.contourArea(contours[i]) > tc:
detect=detect+1
rect = contours[i]
x, y, w, h = cv2.boundingRect(rect)
cv2.rectangle(img, (x-w, y-h), (x + w*2, y + h*2), (0, 0, 255), 3)
return img,detect
fontFace =cv2.FONT_HERSHEY_SIMPLEX
video = ThreadingVideoCapture(cPATH)
video.start()
if not video.isOpened():
raise RuntimeError
W = video.get(cv2.CAP_PROP_FRAME_WIDTH)
H = video.get(cv2.CAP_PROP_FRAME_HEIGHT)
W2,H2=int(W/2),int(H/2)
cv2.namedWindow('ATOM', cv2.WINDOW_AUTOSIZE)
track, reverse,disp = False,False,False
avg=None
th = 10
tc = 25
x,y=0,0
writer = None
time_start = time.time()
frame=0
fname=None
log=PATH+'/metro.log'
detect=0
while(True):
ret, img = video.read()
if ret:
org = img.copy()
img = cv2.resize(img, dsize=(W2,H2))
img=img[0:int(H2*0.85),0:int(W2)]
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
if reverse:
gray=cv2.bitwise_not(gray)
avg=cv2.bitwise_not(avg)
if avg is None:
avg = gray.copy().astype("float")
continue
cv2.accumulateWeighted(gray, avg, 0.5)
frameDelta = cv2.absdiff(gray, cv2.convertScaleAbs(avg))
thresh = cv2.threshold(frameDelta, th, 255, cv2.THRESH_BINARY)[1]
contours,hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
img,detect=detect_mov(contours,detect)
if writer is None and track and detect !=0:
time_start = time.time()
now=datetime.datetime.today()
date=now.strftime("%Y%m%d")
cDIR=PATH+'/'+date
if not(os.path.exists(cDIR)):
os.mkdir(cDIR)
fname=cDIR+'/'+'E-'+now .strftime("%Y%m%d_%H%M%S")+".avi"
writer = cv2.VideoWriter(fname, fourcc, 15, (int(W), int(H)))
if time.time() - time_start > 5:
if writer is not None:
writer.release()
#f.close()
frame=0
writer = None
now=datetime.datetime.today()
text=now.strftime("%Y%m%d %H%M%S")+' No:'+str(frame)+ ' '+" TH:"+str(th)+" SZ:"+str(tc)
img = cv2.putText(img, text, (30,50), fontFace,1,color=(0, 255, 0))
org = cv2.putText(org, text, (30,50), fontFace,1,color=(0, 255, 0))
text1="REC:"+str(track) + " reverse:" + str(reverse)
if writer is not None:
frame=frame+1
text1=fname+' '+text1
img = cv2.putText(img, text1, (30,80), fontFace,1,color=(0, 255, 0))
#cv2.imshow('thresh-level',thresh)
if disp:
cv2.imshow("ATOM",img)
if writer is not None:
writer.write(org)
else:
now=datetime.datetime.today()
date=now.strftime("%Y%m%d_%H%M%S")
print("disconected:",date)
video.release()
avg = None
video = ThreadingVideoCapture(cPATH)
video.start()
k=cv2.waitKey(int(1000 / 30)) & 0xFF
key(k)
if k== ord('q'):
break
video.release()
if writer is not None:
writer.release()
cv2.destroyAllWindows()
print('Done.')