-*- coding: utf-8 -*-
#
# https://taku-info.com/bmx055howtouse-mag/
#
from smbus import SMBus
import time
import math
import datetime
import csv
# I2C
ACCL_ADDR = 0x19
ACCL_R_ADDR = 0x02
GYRO_ADDR = 0x69
GYRO_R_ADDR = 0x02
MAG_ADDR = 0x13
MAG_R_ADDR = 0x42
i2c = SMBus(1)
def bmx_setup():
# acc_data_setup : 加速度の値をセットアップ
i2c.write_byte_data(ACCL_ADDR, 0x0F, 0x03)
i2c.write_byte_data(ACCL_ADDR, 0x10, 0x08)
i2c.write_byte_data(ACCL_ADDR, 0x11, 0x00)
time.sleep(0.5)
# gyr_data_setup : ジャイロ値をセットアップ
i2c.write_byte_data(GYRO_ADDR, 0x0F, 0x04)
i2c.write_byte_data(GYRO_ADDR, 0x10, 0x07)
i2c.write_byte_data(GYRO_ADDR, 0x11, 0x00)
time.sleep(0.5)
# mag_data_setup : 地磁気値をセットアップ
data = i2c.read_byte_data(MAG_ADDR, 0x4B)
if(data == 0):
i2c.write_byte_data(MAG_ADDR, 0x4B, 0x83)
time.sleep(0.5)
i2c.write_byte_data(MAG_ADDR, 0x4B, 0x01)
i2c.write_byte_data(MAG_ADDR, 0x4C, 0x00)
i2c.write_byte_data(MAG_ADDR, 0x4E, 0x84)
i2c.write_byte_data(MAG_ADDR, 0x51, 0x04)
i2c.write_byte_data(MAG_ADDR, 0x52, 0x16)
time.sleep(0.5)
def acc_value():
data = [0, 0, 0, 0, 0, 0]
acc_data = [0.0, 0.0, 0.0]
try:
for i in range(6):
data[i] = i2c.read_byte_data(ACCL_ADDR, ACCL_R_ADDR + i)
for i in range(3):
acc_data[i] = ((data[2*i + 1] * 256) + int(data[2*i] & 0xF0)) / 16
if acc_data[i] > 2047:
acc_data[i] -= 4096
acc_data[i] *= 0.0098
except IOError as e:
print("I/O error({0}): {1}".format(e.errno, e.strerror))
return acc_data
def gyro_value():
data = [0, 0, 0, 0, 0, 0]
gyro_data = [0.0, 0.0, 0.0]
try:
for i in range(6):
data[i] = i2c.read_byte_data(GYRO_ADDR, GYRO_R_ADDR + i)
for i in range(3):
gyro_data[i] = (data[2*i + 1] * 256) + data[2*i]
if gyro_data[i] > 32767:
gyro_data[i] -= 65536
gyro_data[i] *= 0.0038
except IOError as e:
print("I/O error({0}): {1}".format(e.errno, e.strerror))
return gyro_data
def mag_value():
data = [0, 0, 0, 0, 0, 0, 0, 0]
mag_data = [0.0, 0.0, 0.0]
try:
for i in range(8):
data[i] = i2c.read_byte_data(MAG_ADDR, MAG_R_ADDR + i)
for i in range(3):
if i != 2:
mag_data[i] = ((data[2*i + 1] * 256) + (data[2*i] & 0xF8)) / 8
if mag_data[i] > 4095:
mag_data[i] -= 8192
else:
mag_data[i] = ((data[2*i + 1] * 256) + (data[2*i] & 0xFE)) / 2
if mag_data[i] > 16383:
mag_data[i] -= 32768
except IOError as e:
print("I/O error({0}): {1}".format(e.errno, e.strerror))
return mag_data
if __name__ == "__main__":
bmx_setup()
time.sleep(0.1)
now_time = datetime.datetime.now()
filename = 'test_' + now_time.strftime('%Y%m%d_%H%M%S') + '.csv'
# ファイル,1行目(カラム)の作成
with open(filename, 'a') as f:
writer = csv.writer(f)
writer.writerow(['Mag_x', 'Mag_y', 'Mag_z'])
while True:
#acc = acc_value()
#gyro= gyro_value()
mag = mag_value()
theta = math.atan2(mag[1],mag[0]) * 180.0 / 3.141592
if ( theta < 0 ):
theta = theta + 360.0
'''
theta = 360.0 - theta
print("Accl -> x:{}, y:{}, z: {}".format(acc[0], acc[1], acc[2]))
print("Gyro -> x:{}, y:{}, z: {}".format(gyro[0], gyro[1], gyro[2]))
print("Mag -> x:{}, y:{}, z: {}".format(mag[0], mag[1], mag[2]))
'''
print(theta)
time.sleep(0.02)
with open(filename, 'a', newline="") as f:
writer = csv.writer(f)
writer.writerow([mag[0], mag[1], mag[2]])
%matplotlib nbagg
import os
import pandas as pd
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
import math
import numpy as np
### データの読み込み
df = pd.read_csv('BMX055/data4.csv')
print(df)
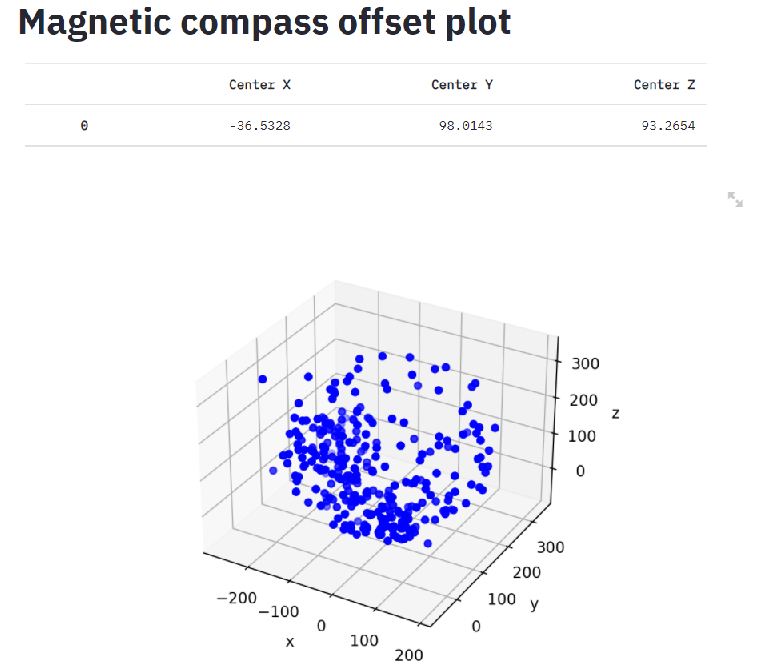
a_x=np.average(df['Mag_x'])
a_y=np.average(df['Mag_y'])
a_z=np.average(df['Mag_z'])
print(round(a_x,2),round(a_y,2),round(a_z,2))
# ここからグラフ描画
# グラフの入れ物を用意する。
fig = plt.figure()
#ax = Axes3D(fig) <--- warning対策
ax = fig.add_subplot(111, projection='3d')
# 軸のラベルを設定する。
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('z')
# グラフを表示する。
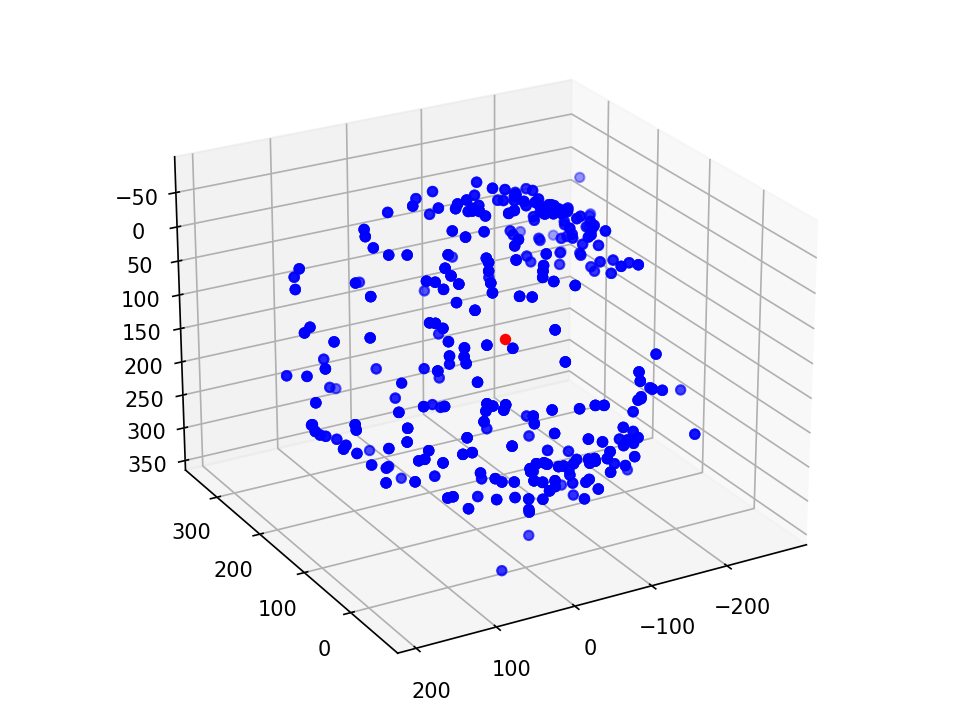
ax.scatter3D(df['Mag_x'],df['Mag_y'],df['Mag_z'],color="blue")
ax.scatter3D(a_x,a_y,a_z,color="red")
plt.show()