






10秒間隔で画像を400枚 jpgファイルとして保存
事前にM-JPEG streamerがインストールされ、アドレスxxx.xxx.xxx.xxx:8080で稼働している環境で、ファイル名 T0000.jpgからT0399.jpgとして画像を保存します。
import time
import cv2
# VideoCapture オブジェクトを取得します
URL = "http://xxx.xxx.xxx.xxx:8080/?action=stream"
capture = cv2.VideoCapture(URL)
for n in range(400):
ret, frame = capture.read()
name = "T" + '{:04d}'.format(n)+".jpg"
print(name)
cv2.imwrite(name, frame)
time.sleep(10)
print("Done!")jpgファイルからmp4動画を生成
import glob
import cv2
img_array = []
for filename in sorted(glob.glob("*.jpg")):
print(filename)
img = cv2.imread(filename)
height, width, layers = img.shape
size = (width, height)
img_array.append(img)
name = 'project.mp4'
out = cv2.VideoWriter(name, cv2.VideoWriter_fourcc(*'mp4v'), 5.0, size)
for i in range(len(img_array)):
out.write(img_array[i])
out.release()生成したmp4動画の編集(不要部分の削除、回転、再生速度の調整など)には、Windows10標準のソフト「フォト」が便利。
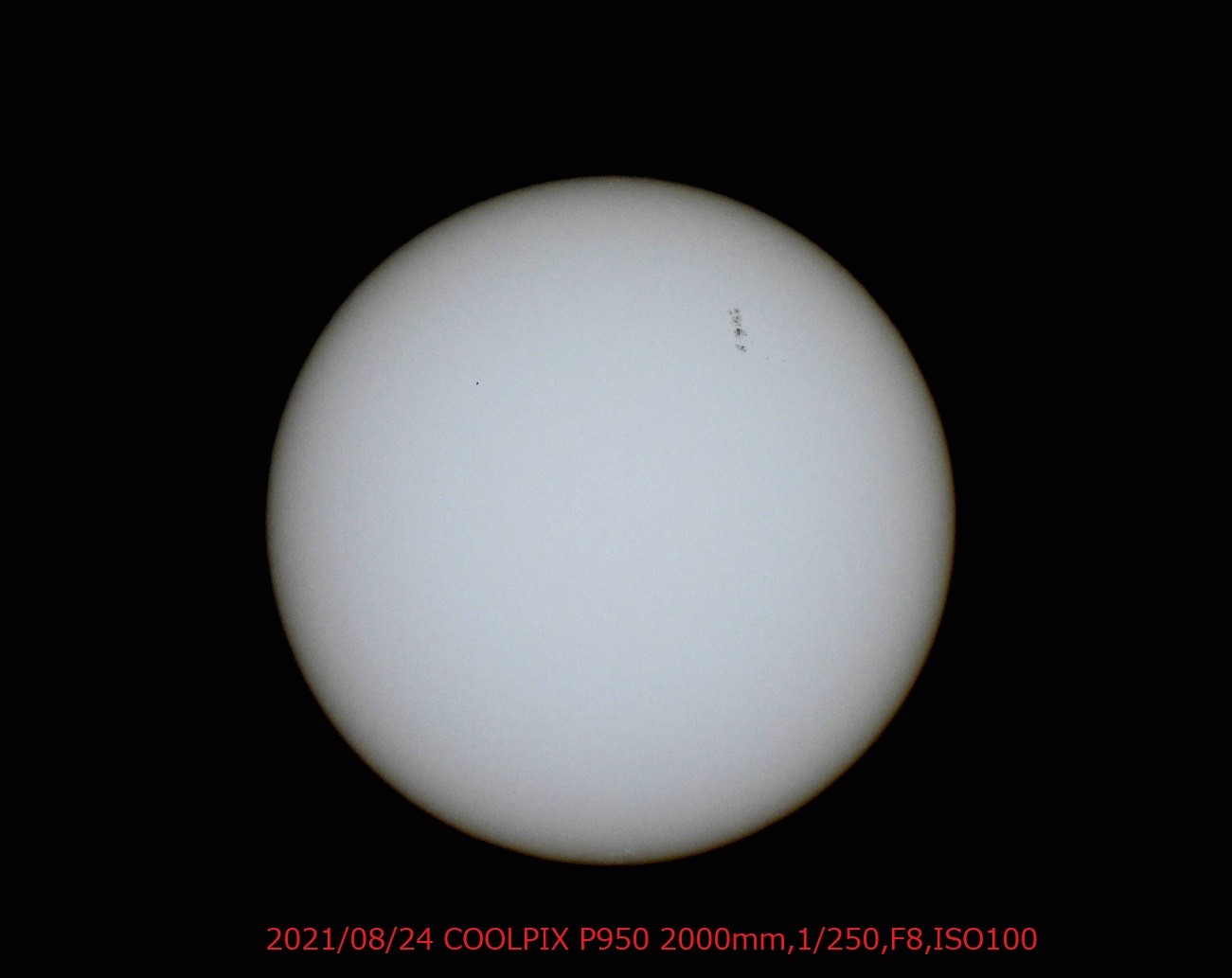
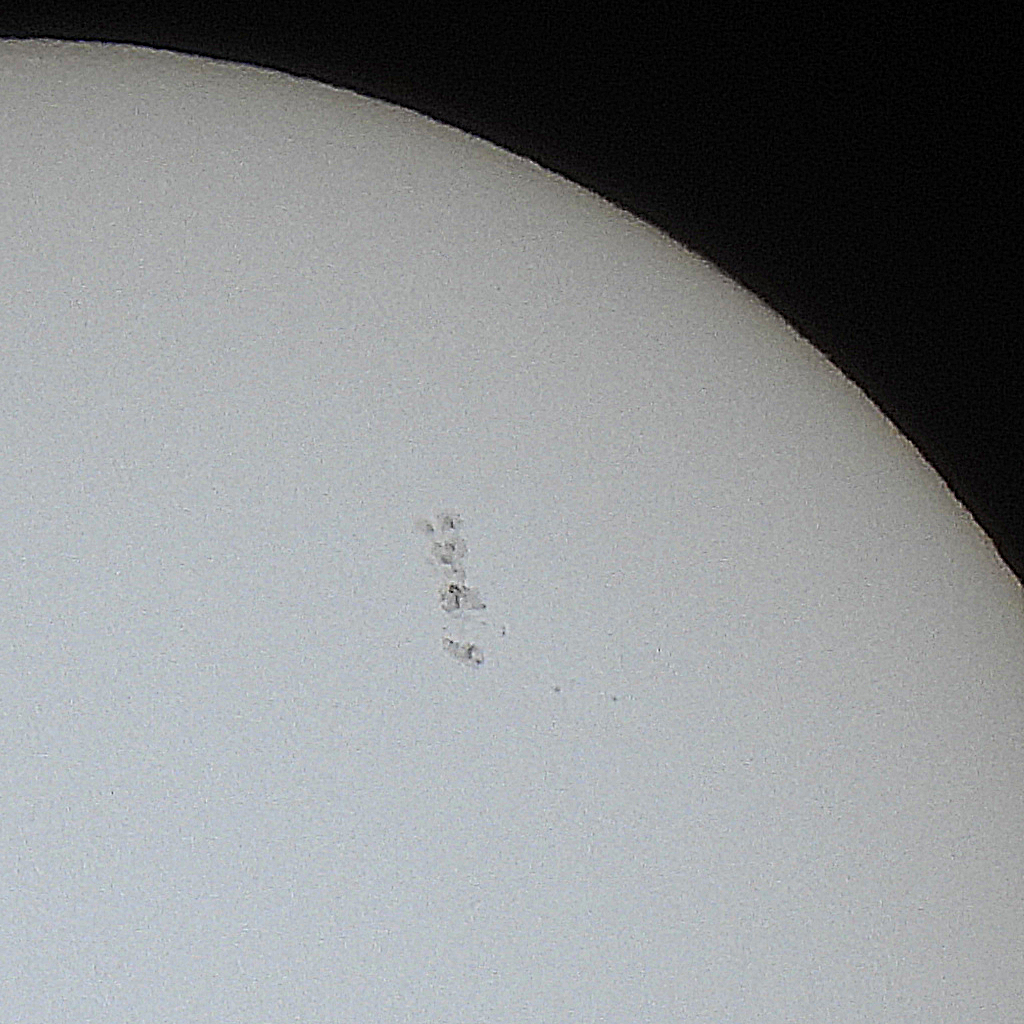
作例


Raspberry Pi3Bの環境
$ uname -a
Linux ps2 5.10.52-v7+ #1440 SMP Tue Jul 27 09:54:13 BST 2021 armv7l GNU/Linux
$ cat /etc/os-release
PRETTY_NAME="Raspbian GNU/Linux 10 (buster)"
NAME="Raspbian GNU/Linux"
VERSION_ID="10"
VERSION="10 (buster)"
VERSION_CODENAME=buster
ID=raspbian
ID_LIKE=debian
HOME_URL="http://www.raspbian.org/"
SUPPORT_URL="http://www.raspbian.org/RaspbianForums"
BUG_REPORT_URL="http://www.raspbian.org/RaspbianBugs"ダウンロードサイトからLinux 32bit ARM(armfh)をダウンロードしてインストール
$ sudo dpkg -i Repetier-Server-1.1.2-Linux.debインストールしたら、ブラウザで http://xxx.xxx.xxx.xxx:3344 をアクセスすると、プリンターの設定画面が表示されるので、マニュアルに従ってプリンターの追加・設定を行います。
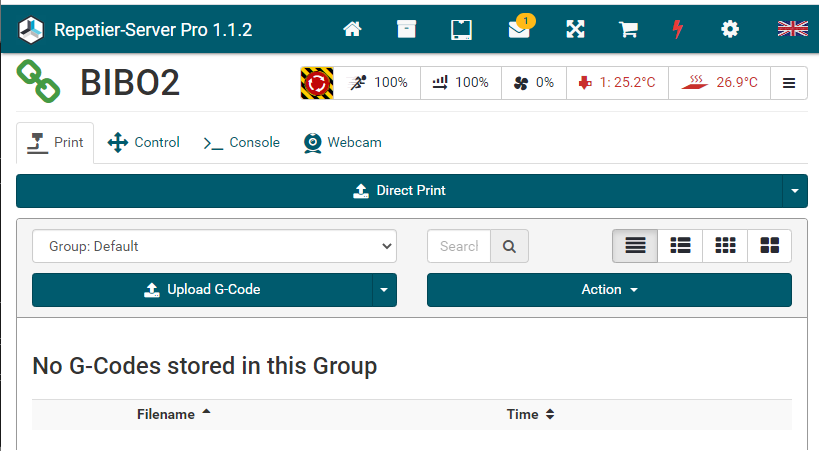
Webcam のインストール
Repetier-ServerでWebcamの機能を利用するには、有料のプロバージョンが必要なため、 次のような画面となって、サーバーでは表示できません。
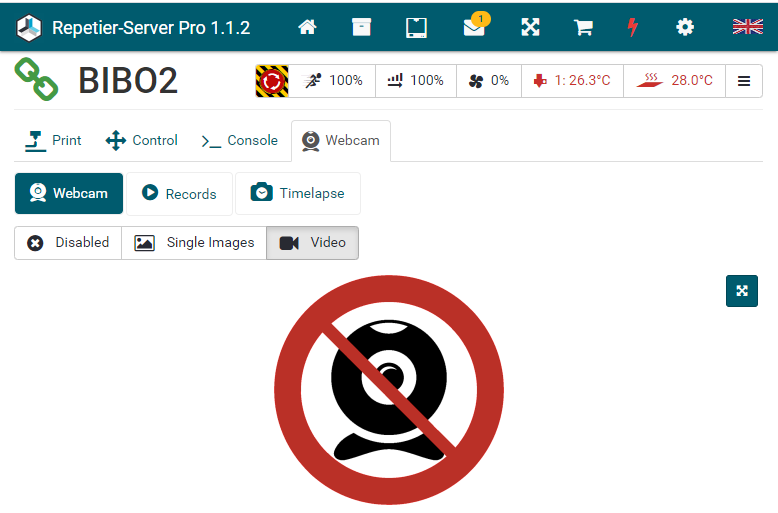
ただし、インストールしたWebcamのストリーミング機能は動作しているようで、ブラウザーで http://xxx.xxx.xxx.xxx:8080 をアクセスすると次のようにストリーミング映像を見ることができました。(カメラは窓の外向けに設置)
Start, Stop and Restart Repetier-Server
# Start server
sudo service RepetierServer start
sudo /etc/init.d/RepetierServer start
# Stop server
sudo service RepetierServer stop
sudo /etc/init.d/RepetierServer stop
# Restart server
sudo service RepetierServer stop
sudo /etc/init.d/RepetierServer restart
(BMP280のチップも搭載されているMPU9250)
手順
(1)raspberry piのGPIO設定でI2Cを有効化(参考URL https://www.indoorcorgielec.com/resources/raspberry-pi/raspberry-pi-i2c/)
(2) raspberry pi へi2c-toolsをインストール
$sudo apt install i2c-toolsraspberry piと4本の線(3.3V,SDA,SCL,GND)でMPU9250を接続

raspiのPIN 1/3/5/9(3.3V, SDA, SCL, GND)へセンサーを接続
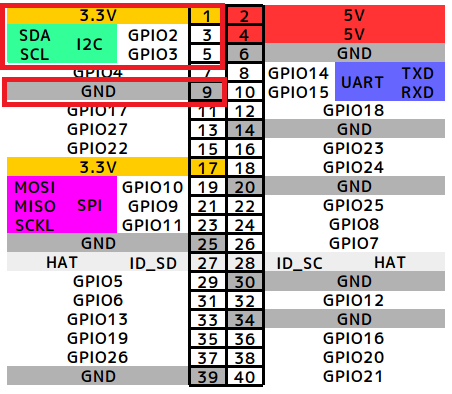
i2cdetectコマンドで接続を確認する
$ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- 68 -- -- -- -- -- -- --
70: -- -- -- -- -- -- 76 --
※ 0x68がMPU9250のアドレス
※ 0x76がBMP280のI2Cアドレス
実行例:bmp280.py 出力: 気圧、温度、湿度(BMP280ではデータ無し)
$ python -V
Python 3.7.3
$ python bmp280.py
982.60,31.66,0.00センサーからデータを読み出す。こちらのpythonコードを利用(記事はBME280のコードですが、 BMP280 そのままで動きました。ただし、湿度のデータは取得できません。
bmp280.py
#coding: utf-8
import smbus
import time
bus_number = 1
i2c_address = 0x76
bus = smbus.SMBus(bus_number)
digT = []
digP = []
digH = []
t_fine = 0.0
def writeReg(reg_address, data):
bus.write_byte_data(i2c_address,reg_address,data)
def get_calib_param():
calib = []
for i in range (0x88,0x88+24):
calib.append(bus.read_byte_data(i2c_address,i))
calib.append(bus.read_byte_data(i2c_address,0xA1))
for i in range (0xE1,0xE1+7):
calib.append(bus.read_byte_data(i2c_address,i))
digT.append((calib[1] << 8) | calib[0])
digT.append((calib[3] << 8) | calib[2])
digT.append((calib[5] << 8) | calib[4])
digP.append((calib[7] << 8) | calib[6])
digP.append((calib[9] << 8) | calib[8])
digP.append((calib[11]<< 8) | calib[10])
digP.append((calib[13]<< 8) | calib[12])
digP.append((calib[15]<< 8) | calib[14])
digP.append((calib[17]<< 8) | calib[16])
digP.append((calib[19]<< 8) | calib[18])
digP.append((calib[21]<< 8) | calib[20])
digP.append((calib[23]<< 8) | calib[22])
digH.append( calib[24] )
digH.append((calib[26]<< 8) | calib[25])
digH.append( calib[27] )
digH.append((calib[28]<< 4) | (0x0F & calib[29]))
digH.append((calib[30]<< 4) | ((calib[29] >> 4) & 0x0F))
digH.append( calib[31] )
for i in range(1,2):
if digT[i] & 0x8000:
digT[i] = (-digT[i] ^ 0xFFFF) + 1
for i in range(1,8):
if digP[i] & 0x8000:
digP[i] = (-digP[i] ^ 0xFFFF) + 1
for i in range(0,6):
if digH[i] & 0x8000:
digH[i] = (-digH[i] ^ 0xFFFF) + 1
def readData():
data = []
for i in range (0xF7, 0xF7+8):
data.append(bus.read_byte_data(i2c_address,i))
pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4)
temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4)
hum_raw = (data[6] << 8) | data[7]
#compensate_T(temp_raw)
#compensate_P(pres_raw)
#compensate_H(hum_raw)
t = compensate_T(temp_raw)
p = compensate_P(pres_raw)
h = compensate_H(hum_raw)
return p + "," + t + "," + h
def compensate_P(adc_P):
global t_fine
pressure = 0.0
v1 = (t_fine / 2.0) - 64000.0
v2 = (((v1 / 4.0) * (v1 / 4.0)) / 2048) * digP[5]
v2 = v2 + ((v1 * digP[4]) * 2.0)
v2 = (v2 / 4.0) + (digP[3] * 65536.0)
v1 = (((digP[2] * (((v1 / 4.0) * (v1 / 4.0)) / 8192)) / 8) + ((digP[1] * v1) / 2.0)) / 262144
v1 = ((32768 + v1) * digP[0]) / 32768
if v1 == 0:
return 0
pressure = ((1048576 - adc_P) - (v2 / 4096)) * 3125
if pressure < 0x80000000:
pressure = (pressure * 2.0) / v1
else:
pressure = (pressure / v1) * 2
v1 = (digP[8] * (((pressure / 8.0) * (pressure / 8.0)) / 8192.0)) / 4096
v2 = ((pressure / 4.0) * digP[7]) / 8192.0
pressure = pressure + ((v1 + v2 + digP[6]) / 16.0)
#print "pressure : %7.2f hPa" % (pressure/100)
return "%7.2f" % (pressure/100)
def compensate_T(adc_T):
global t_fine
v1 = (adc_T / 16384.0 - digT[0] / 1024.0) * digT[1]
v2 = (adc_T / 131072.0 - digT[0] / 8192.0) * (adc_T / 131072.0 - digT[0] / 8192.0) * digT[2]
t_fine = v1 + v2
temperature = t_fine / 5120.0
#print "temp : %-6.2f ℃" % (temperature)
return "%.2f" % (temperature)
def compensate_H(adc_H):
global t_fine
var_h = t_fine - 76800.0
if var_h != 0:
var_h = (adc_H - (digH[3] * 64.0 + digH[4]/16384.0 * var_h)) * (digH[1] / 65536.0 * (1.0 + digH[5] / 67108864.0 * var_h * (1.0 + digH[2] / 67108864.0 * var_h)))
else:
return 0
var_h = var_h * (1.0 - digH[0] * var_h / 524288.0)
if var_h > 100.0:
var_h = 100.0
elif var_h < 0.0:
var_h = 0.0
#print "hum : %6.2f %" % (var_h)
return "%.2f" % (var_h)
def setup():
osrs_t = 1 #Temperature oversampling x 1
osrs_p = 1 #Pressure oversampling x 1
osrs_h = 1 #Humidity oversampling x 1
mode = 3 #Normal mode
t_sb = 5 #Tstandby 1000ms
filter = 0 #Filter off
spi3w_en = 0 #3-wire SPI Disable
ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode
config_reg = (t_sb << 5) | (filter << 2) | spi3w_en
ctrl_hum_reg = osrs_h
writeReg(0xF2,ctrl_hum_reg)
writeReg(0xF4,ctrl_meas_reg)
writeReg(0xF5,config_reg)
setup()
get_calib_param()
if __name__ == '__main__':
try:
print(readData())
except KeyboardInterrupt:
pass



