黒点がまったく見えない

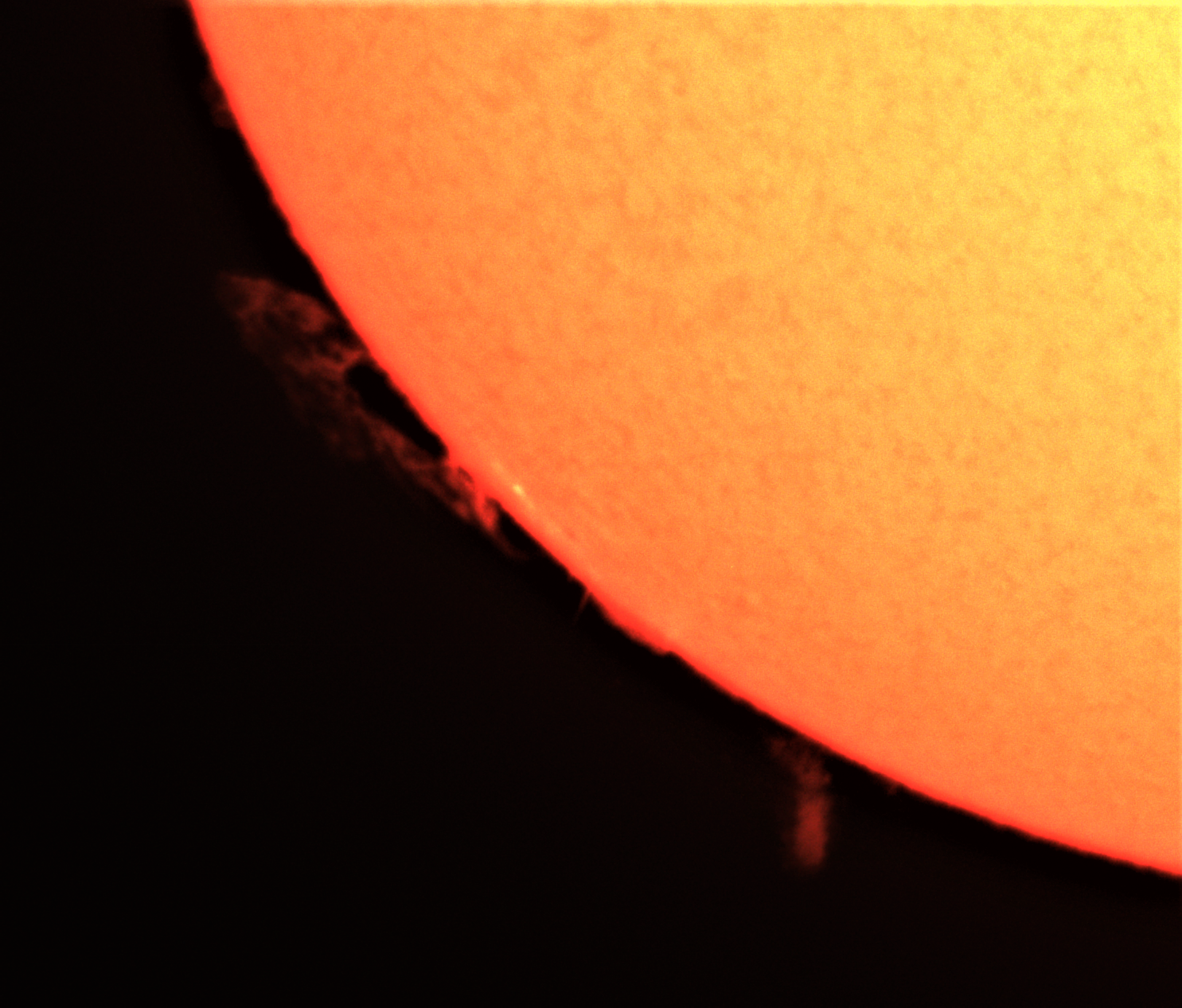

望遠鏡:LUNT SOLAR SYSTEMS LS60THα, 2x barlow, CCD CAMERA:ZOW ASI1600MC Pro

望遠鏡:SVBONY SV503 80 ED f/7, カメラ: ZOW ASI1600MC Pro
黒点がまったく見えない
望遠鏡:LUNT SOLAR SYSTEMS LS60THα, 2x barlow, CCD CAMERA:ZOW ASI1600MC Pro
望遠鏡:SVBONY SV503 80 ED f/7, カメラ: ZOW ASI1600MC Pro











(BMP280のチップも搭載されているMPU9250)
手順
(1)raspberry piのGPIO設定でI2Cを有効化(参考URL https://www.indoorcorgielec.com/resources/raspberry-pi/raspberry-pi-i2c/)
(2) raspberry pi へi2c-toolsをインストール
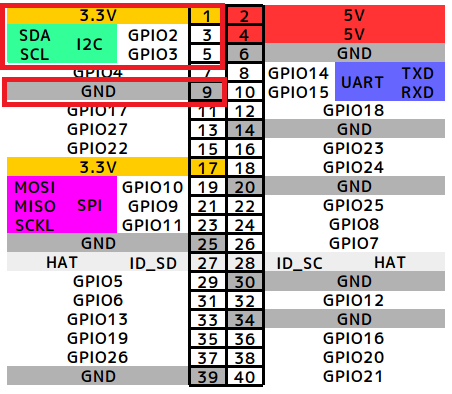
$sudo apt install i2c-toolsraspberry piと4本の線(3.3V,SDA,SCL,GND)でMPU9250を接続

raspiのPIN 1/3/5/9(3.3V, SDA, SCL, GND)へセンサーを接続
i2cdetectコマンドで接続を確認する
$ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- 68 -- -- -- -- -- -- --
70: -- -- -- -- -- -- 76 --
※ 0x68がMPU9250のアドレス
※ 0x76がBMP280のI2Cアドレス
実行例:bmp280.py 出力: 気圧、温度、湿度(BMP280ではデータ無し)
$ python -V
Python 3.7.3
$ python bmp280.py
982.60,31.66,0.00センサーからデータを読み出す。こちらのpythonコードを利用(記事はBME280のコードですが、 BMP280 そのままで動きました。ただし、湿度のデータは取得できません。
bmp280.py
#coding: utf-8
import smbus
import time
bus_number = 1
i2c_address = 0x76
bus = smbus.SMBus(bus_number)
digT = []
digP = []
digH = []
t_fine = 0.0
def writeReg(reg_address, data):
bus.write_byte_data(i2c_address,reg_address,data)
def get_calib_param():
calib = []
for i in range (0x88,0x88+24):
calib.append(bus.read_byte_data(i2c_address,i))
calib.append(bus.read_byte_data(i2c_address,0xA1))
for i in range (0xE1,0xE1+7):
calib.append(bus.read_byte_data(i2c_address,i))
digT.append((calib[1] << 8) | calib[0])
digT.append((calib[3] << 8) | calib[2])
digT.append((calib[5] << 8) | calib[4])
digP.append((calib[7] << 8) | calib[6])
digP.append((calib[9] << 8) | calib[8])
digP.append((calib[11]<< 8) | calib[10])
digP.append((calib[13]<< 8) | calib[12])
digP.append((calib[15]<< 8) | calib[14])
digP.append((calib[17]<< 8) | calib[16])
digP.append((calib[19]<< 8) | calib[18])
digP.append((calib[21]<< 8) | calib[20])
digP.append((calib[23]<< 8) | calib[22])
digH.append( calib[24] )
digH.append((calib[26]<< 8) | calib[25])
digH.append( calib[27] )
digH.append((calib[28]<< 4) | (0x0F & calib[29]))
digH.append((calib[30]<< 4) | ((calib[29] >> 4) & 0x0F))
digH.append( calib[31] )
for i in range(1,2):
if digT[i] & 0x8000:
digT[i] = (-digT[i] ^ 0xFFFF) + 1
for i in range(1,8):
if digP[i] & 0x8000:
digP[i] = (-digP[i] ^ 0xFFFF) + 1
for i in range(0,6):
if digH[i] & 0x8000:
digH[i] = (-digH[i] ^ 0xFFFF) + 1
def readData():
data = []
for i in range (0xF7, 0xF7+8):
data.append(bus.read_byte_data(i2c_address,i))
pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4)
temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4)
hum_raw = (data[6] << 8) | data[7]
#compensate_T(temp_raw)
#compensate_P(pres_raw)
#compensate_H(hum_raw)
t = compensate_T(temp_raw)
p = compensate_P(pres_raw)
h = compensate_H(hum_raw)
return p + "," + t + "," + h
def compensate_P(adc_P):
global t_fine
pressure = 0.0
v1 = (t_fine / 2.0) - 64000.0
v2 = (((v1 / 4.0) * (v1 / 4.0)) / 2048) * digP[5]
v2 = v2 + ((v1 * digP[4]) * 2.0)
v2 = (v2 / 4.0) + (digP[3] * 65536.0)
v1 = (((digP[2] * (((v1 / 4.0) * (v1 / 4.0)) / 8192)) / 8) + ((digP[1] * v1) / 2.0)) / 262144
v1 = ((32768 + v1) * digP[0]) / 32768
if v1 == 0:
return 0
pressure = ((1048576 - adc_P) - (v2 / 4096)) * 3125
if pressure < 0x80000000:
pressure = (pressure * 2.0) / v1
else:
pressure = (pressure / v1) * 2
v1 = (digP[8] * (((pressure / 8.0) * (pressure / 8.0)) / 8192.0)) / 4096
v2 = ((pressure / 4.0) * digP[7]) / 8192.0
pressure = pressure + ((v1 + v2 + digP[6]) / 16.0)
#print "pressure : %7.2f hPa" % (pressure/100)
return "%7.2f" % (pressure/100)
def compensate_T(adc_T):
global t_fine
v1 = (adc_T / 16384.0 - digT[0] / 1024.0) * digT[1]
v2 = (adc_T / 131072.0 - digT[0] / 8192.0) * (adc_T / 131072.0 - digT[0] / 8192.0) * digT[2]
t_fine = v1 + v2
temperature = t_fine / 5120.0
#print "temp : %-6.2f ℃" % (temperature)
return "%.2f" % (temperature)
def compensate_H(adc_H):
global t_fine
var_h = t_fine - 76800.0
if var_h != 0:
var_h = (adc_H - (digH[3] * 64.0 + digH[4]/16384.0 * var_h)) * (digH[1] / 65536.0 * (1.0 + digH[5] / 67108864.0 * var_h * (1.0 + digH[2] / 67108864.0 * var_h)))
else:
return 0
var_h = var_h * (1.0 - digH[0] * var_h / 524288.0)
if var_h > 100.0:
var_h = 100.0
elif var_h < 0.0:
var_h = 0.0
#print "hum : %6.2f %" % (var_h)
return "%.2f" % (var_h)
def setup():
osrs_t = 1 #Temperature oversampling x 1
osrs_p = 1 #Pressure oversampling x 1
osrs_h = 1 #Humidity oversampling x 1
mode = 3 #Normal mode
t_sb = 5 #Tstandby 1000ms
filter = 0 #Filter off
spi3w_en = 0 #3-wire SPI Disable
ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode
config_reg = (t_sb << 5) | (filter << 2) | spi3w_en
ctrl_hum_reg = osrs_h
writeReg(0xF2,ctrl_hum_reg)
writeReg(0xF4,ctrl_meas_reg)
writeReg(0xF5,config_reg)
setup()
get_calib_param()
if __name__ == '__main__':
try:
print(readData())
except KeyboardInterrupt:
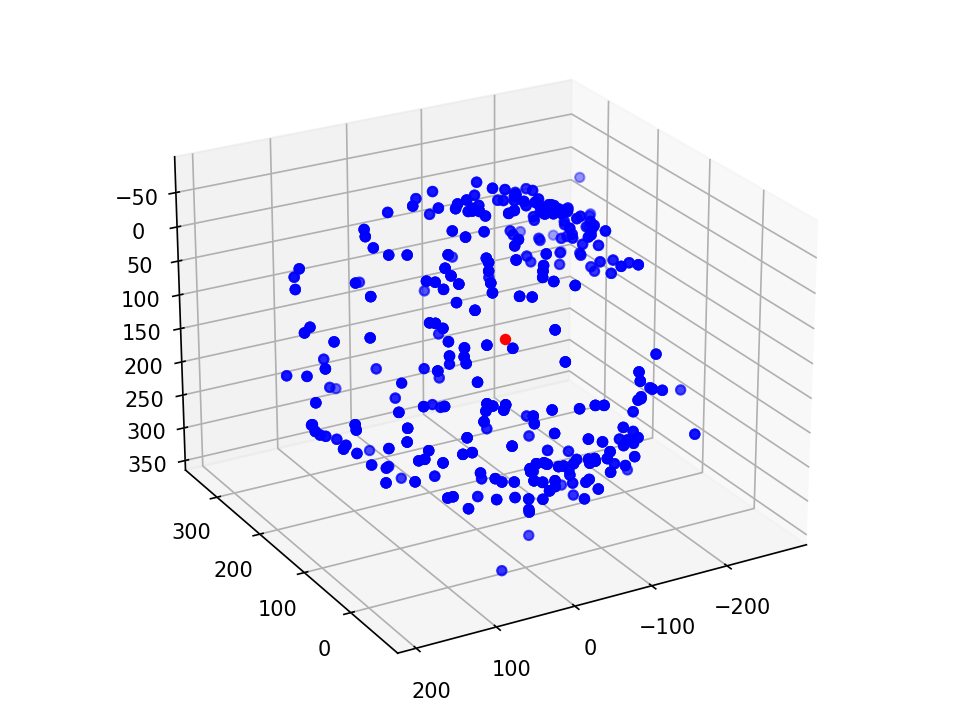
pass9軸センサーBMX055の磁気コンパスのデータ(x,y,z)を取得して可視化してみました。センサーはi2cでRaspberry Piに接続しています。
赤の点は、x,y,zのそれぞれの平均値を示す。
-*- coding: utf-8 -*-
#
# https://taku-info.com/bmx055howtouse-mag/
#
from smbus import SMBus
import time
import math
import datetime
import csv
# I2C
ACCL_ADDR = 0x19
ACCL_R_ADDR = 0x02
GYRO_ADDR = 0x69
GYRO_R_ADDR = 0x02
MAG_ADDR = 0x13
MAG_R_ADDR = 0x42
i2c = SMBus(1)
def bmx_setup():
# acc_data_setup : 加速度の値をセットアップ
i2c.write_byte_data(ACCL_ADDR, 0x0F, 0x03)
i2c.write_byte_data(ACCL_ADDR, 0x10, 0x08)
i2c.write_byte_data(ACCL_ADDR, 0x11, 0x00)
time.sleep(0.5)
# gyr_data_setup : ジャイロ値をセットアップ
i2c.write_byte_data(GYRO_ADDR, 0x0F, 0x04)
i2c.write_byte_data(GYRO_ADDR, 0x10, 0x07)
i2c.write_byte_data(GYRO_ADDR, 0x11, 0x00)
time.sleep(0.5)
# mag_data_setup : 地磁気値をセットアップ
data = i2c.read_byte_data(MAG_ADDR, 0x4B)
if(data == 0):
i2c.write_byte_data(MAG_ADDR, 0x4B, 0x83)
time.sleep(0.5)
i2c.write_byte_data(MAG_ADDR, 0x4B, 0x01)
i2c.write_byte_data(MAG_ADDR, 0x4C, 0x00)
i2c.write_byte_data(MAG_ADDR, 0x4E, 0x84)
i2c.write_byte_data(MAG_ADDR, 0x51, 0x04)
i2c.write_byte_data(MAG_ADDR, 0x52, 0x16)
time.sleep(0.5)
def acc_value():
data = [0, 0, 0, 0, 0, 0]
acc_data = [0.0, 0.0, 0.0]
try:
for i in range(6):
data[i] = i2c.read_byte_data(ACCL_ADDR, ACCL_R_ADDR + i)
for i in range(3):
acc_data[i] = ((data[2*i + 1] * 256) + int(data[2*i] & 0xF0)) / 16
if acc_data[i] > 2047:
acc_data[i] -= 4096
acc_data[i] *= 0.0098
except IOError as e:
print("I/O error({0}): {1}".format(e.errno, e.strerror))
return acc_data
def gyro_value():
data = [0, 0, 0, 0, 0, 0]
gyro_data = [0.0, 0.0, 0.0]
try:
for i in range(6):
data[i] = i2c.read_byte_data(GYRO_ADDR, GYRO_R_ADDR + i)
for i in range(3):
gyro_data[i] = (data[2*i + 1] * 256) + data[2*i]
if gyro_data[i] > 32767:
gyro_data[i] -= 65536
gyro_data[i] *= 0.0038
except IOError as e:
print("I/O error({0}): {1}".format(e.errno, e.strerror))
return gyro_data
def mag_value():
data = [0, 0, 0, 0, 0, 0, 0, 0]
mag_data = [0.0, 0.0, 0.0]
try:
for i in range(8):
data[i] = i2c.read_byte_data(MAG_ADDR, MAG_R_ADDR + i)
for i in range(3):
if i != 2:
mag_data[i] = ((data[2*i + 1] * 256) + (data[2*i] & 0xF8)) / 8
if mag_data[i] > 4095:
mag_data[i] -= 8192
else:
mag_data[i] = ((data[2*i + 1] * 256) + (data[2*i] & 0xFE)) / 2
if mag_data[i] > 16383:
mag_data[i] -= 32768
except IOError as e:
print("I/O error({0}): {1}".format(e.errno, e.strerror))
return mag_data
if __name__ == "__main__":
bmx_setup()
time.sleep(0.1)
now_time = datetime.datetime.now()
filename = 'test_' + now_time.strftime('%Y%m%d_%H%M%S') + '.csv'
# ファイル,1行目(カラム)の作成
with open(filename, 'a') as f:
writer = csv.writer(f)
writer.writerow(['Mag_x', 'Mag_y', 'Mag_z'])
while True:
#acc = acc_value()
#gyro= gyro_value()
mag = mag_value()
theta = math.atan2(mag[1],mag[0]) * 180.0 / 3.141592
if ( theta < 0 ):
theta = theta + 360.0
'''
theta = 360.0 - theta
print("Accl -> x:{}, y:{}, z: {}".format(acc[0], acc[1], acc[2]))
print("Gyro -> x:{}, y:{}, z: {}".format(gyro[0], gyro[1], gyro[2]))
print("Mag -> x:{}, y:{}, z: {}".format(mag[0], mag[1], mag[2]))
'''
print(theta)
time.sleep(0.02)
with open(filename, 'a', newline="") as f:
writer = csv.writer(f)
writer.writerow([mag[0], mag[1], mag[2]])%matplotlib nbagg
import os
import pandas as pd
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
import math
import numpy as np
### データの読み込み
df = pd.read_csv('BMX055/data4.csv')
print(df)
a_x=np.average(df['Mag_x'])
a_y=np.average(df['Mag_y'])
a_z=np.average(df['Mag_z'])
print(round(a_x,2),round(a_y,2),round(a_z,2))
# ここからグラフ描画
# グラフの入れ物を用意する。
fig = plt.figure()
#ax = Axes3D(fig) <--- warning対策
ax = fig.add_subplot(111, projection='3d')
# 軸のラベルを設定する。
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('z')
# グラフを表示する。
ax.scatter3D(df['Mag_x'],df['Mag_y'],df['Mag_z'],color="blue")
ax.scatter3D(a_x,a_y,a_z,color="red")
plt.show()
Webスクレイピング超入門】2時間で基礎を完全マスター!PythonによるWebスクレイピング入門 連結版
https://www.youtube.com/watch?v=VRFfAeW30qE
【初学者必見】Pythonで実データの需要予測を実装したい人がはじめに見る動画
https://www.youtube.com/watch?v=uKq_dgEUVfA&list=RDCMUC0xRMqPOyRNPTaL6BxhbCnQ&index=11
Python×自動化】PyAutoGUIを用いてPC操作の自動化方法を40分でわかりやすく解説!
https://www.youtube.com/watch?v=zmrbS98KXyo&list=RDCMUC0xRMqPOyRNPTaL6BxhbCnQ&index=10
今話題のPythonライブラリStreamlitを用いて、顔検出アプリの作成から公開までの流れをわかりやすく解説
https://www.youtube.com/watch?v=zpBjbK6jic0