- Ubuntuでのapache2の設定確認方法について説明します:基本的な設定確認コマンド
構文チェックbashsudo apachectl -t
またはbashsudo apache2ctl configtest - 詳細な設定確認
sudo apachectl -S # 仮想ホストの設定確認 sudo apachectl -M # 読み込まれているモジュールの確認
Apache2 の設定を確認する
コメントを残す
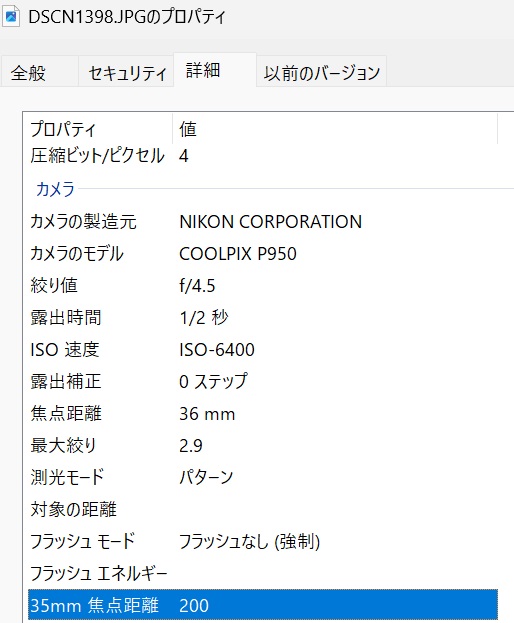
sudo apachectl -tsudo apache2ctl configtestsudo apachectl -S # 仮想ホストの設定確認 sudo apachectl -M # 読み込まれているモジュールの確認10月23日 黄色っぽい2本の線は、送電線。南西から北方向には、すぐ近くに多数の送電線が走っていて、長時間の露光は困難。

10月13日の西空に長い尾が特徴。双眼鏡でも確認できた。

証明書の確認 cat cert.pem |openssl x509 -text -noout
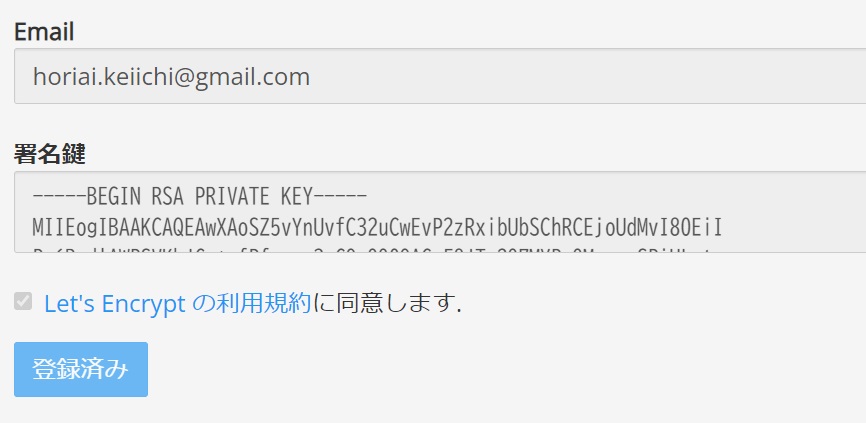
Let’s Encrypt へ登録
Emailを入力して、署名鍵を取得
2. チャレンジトークンの取得

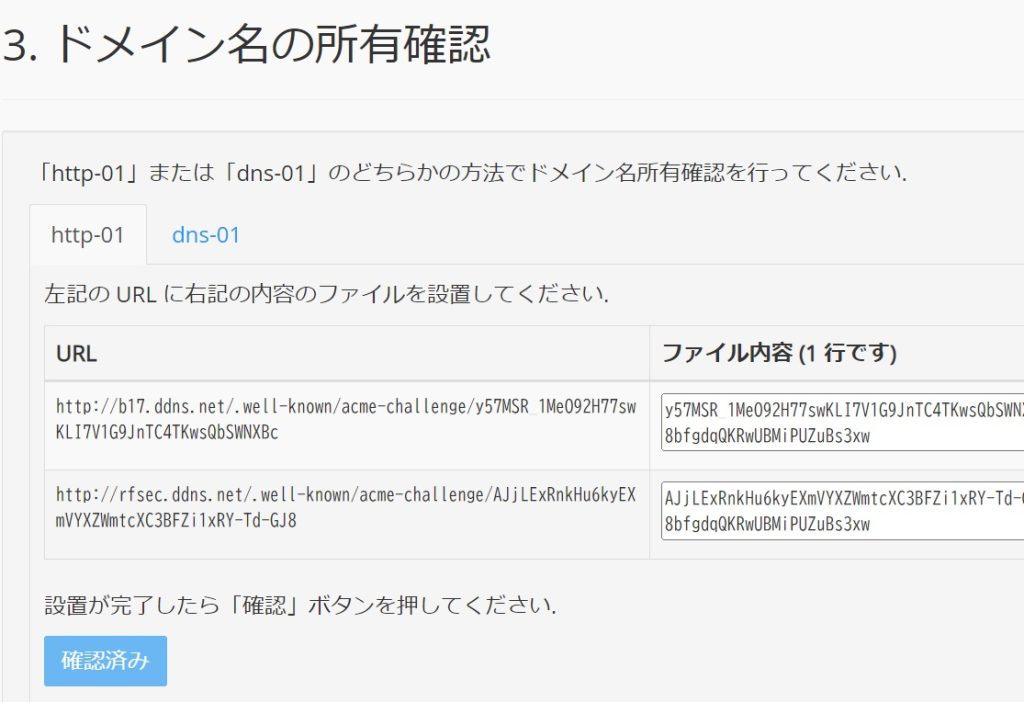
3. ドメイン名の所有確認
4. 証明書発行申請

5. 発行された証明書
cert.pem (サーバ証明書)、chain.pem (中間証明書)、fullchain.pem (サーバ証明書 + 中間証明書)と、STEP4で取得した秘密鍵をサーバーへ設置する
/etc/letsencrypt/archive/live/b17.ddns.net/
インストールの確認
$cat cert.pem |openssl x509 -text -noout
Certificate:
Data:
Version: 3 (0x2)
Serial Number:
04:85:92:51:53:66:49:fe:d6:7a:17:6a:1a:9f:aa:ab:c2:4c
Signature Algorithm: sha256WithRSAEncryption
Issuer: C = US, O = Let's Encrypt, CN = R11
Validity
Not Before: Jan 8 00:12:59 2025 GMT
Not After : Apr 8 00:12:58 2025 GMT
Subject: CN = rfsec.ddns.net化学賞受賞のハサビス氏は、世界最高ランクの囲碁棋士である李世乭に5試合中4試合に勝利したAlphaGoプログラムを開発したほか、機械学習のスタートアップであるDeepMindテクノロジーズを共同で立ち上げCEOを務めた。
生成AIを利用した様々なサービスが利用できる昨今ですが、Googleが今のところ無料で公開しているnotebookLMを使ってみました。(料金については、Googleによると「NotebookLM はまだ早期テスト段階であるため、現時点では料金は発生しません」となっていますが、そのうちに課金の対象になるかも?)
Google NotebookLMは、ユーザがアップロードした資料に対して、要約や質問に対する回答などを得ることができます。試しに、自分が2008年に執筆した博士論文のpdf(約100ページ)をアップロードしてみました。Google NotebookLMの興味深い機能の一つに、男女2人が、アップロードしたファイルの内容についての説明・感想を数分程度の会話を音声で聞くことができます。アップロードした資料が日本語であっても、今のところ音声は英語だけなのが残念な点ですが、再生できるようにしてみました。
Google NotebookLMが処理した結果の「要約」は、次のようになりました。Google NotebookLMの出力は、飾りのないテキストなので、多少読みやすくなるよう手動で体裁を整えました。
マルウェア自動解析システムの研究
1. マルウェアの脅威と対策
近年、マルウェアによる被害が急増しており、その種類や手法も多様化していることを説明。
従来のシグネチャベースの対策では未知のマルウェアへの対応が困難であることを指摘。
マルウェアの挙動解析に基づく自動解析システムの必要性を論述。
2. マルウェア自動解析システムの概要
本研究で提案するマルウェア自動解析システムの全体構成を図を用いて説明。
システムの主要な機能である、マルウェアの動的解析、挙動データの収集、数値化と類似性判定、そして視覚化について概説。
3. マルウェアの動的解析
サンドボックス環境を用いたマルウェアの動的解析手法について解説。
APIコール、レジストリへのアクセス、ネットワーク通信など、解析対象となるマルウェアの挙動を列挙。解析結果から得られる情報とその利点について説明。
4. 挙動データの数値化と類似性の判定
マルウェアの挙動データを数値化するための特徴量抽出方法を説明。
使用する特徴量として、APIコール系列、レジストリキー、通信先ポート番号などを例示。
数値化された挙動データに基づいて、マルウェア間の類似性を判定するためのアルゴリズムを解説。具体的には、ユークリッド距離、マンハッタン距離、コサイン類似度などの距離尺度を用いた類似度計算方法を説明。
5. 挙動データの視覚化
多次元尺度構成法 (MDS) を用いたマルウェア挙動の視覚化手法について説明。
MDS により、高次元の特徴量空間を2次元または3次元に写像することで、マルウェアの類似性を視覚的に表現。視覚化結果から、マルウェアの分類や未知マルウェアの検出が可能になることを示唆。
6. 実験と評価
実験に用いたマルウェア検体データセットの概要を説明。
検体数は約8,000個体で、トレンドマイクロ・ウィルスバスター2007を用いてスキャンし、名前が判明したものを使用。提案システムの性能評価指標として、検出率、誤検知率、処理時間を設定。実験結果に基づいて、提案システムが従来手法と比較して高い検出率と低い誤検知率を達成したことを示す。処理時間についても、実用的な範囲内であることを確認。
7. PDBを用いたマルウェア挙動の可視化
マルウェアの挙動を可視化するために、PDB (Position Dependent Bits) を導入。
PDBを用いることで、マルウェアの挙動をビット列として表現し、視覚的に比較分析することが可能になる。実際に、上位15種類のマルウェアについて、PDBへの変換結果を視覚化し、その特徴を分析。結果として、同種に分類されるマルウェアの挙動は一定ではないものの、利用ポートの状況など、種類ごとに特徴が認められることを示す。
8. 結論と今後の展望
本研究では、マルウェアの挙動解析に基づく自動解析システムを提案し、その有効性を検証。
提案システムは、未知のマルウェアに対しても高い検出率を達成し、マルウェア対策への貢献が期待される。今後の課題として、解析精度の向上、処理速度の高速化、マルウェアの進化への対応などを挙げ、さらなる研究の必要性を論述。
9. 付録
上位15種類のマルウェアのPDB可視化結果の詳細を掲載。実験対象とした検体の内訳を、AV製品ごとに「科名」と「科名+亜種名」で分類し、検体数を表示。特徴量抽出に用いたパラメータ (port100_md50_svcN_rootN_host_file4.hex) と、それによって得られたデータセットの分割方法について説明。各分割データセットにおける、F値、F&V値、F-STD、F&V-STD、Totalなどを表形式で表示。
参考文献
本研究に関連する参考文献を列挙。幹事:畑中さん、新井さん、赤城さん (19回生)
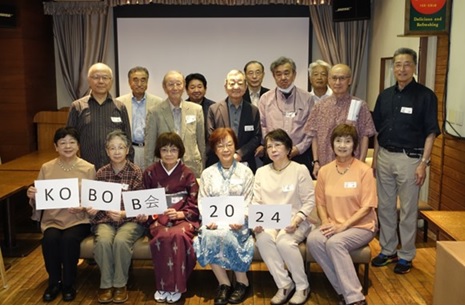
No.1 集合写真1(開催前)
後列左から20回二瓶さん、24回市沢さん、、17回松橋さん、24回柏崎さん、17回石橋さん、、21回堀合さん、24回東さん、20回阿部さん、18回村井さん、19回畑中さん
前列左から21回岡島さん、21回木戸さん、19回新井さん、17回中塩さん、25回東さん、19回赤木さん
No.2 懇談全景

No.3 左から17回松橋さん、17回中塩さん、24回柏崎さん

No.4 左から19回赤木さん、17回中塩さん、19回新井さん

No.5 21回岡島さん自己紹介
左から18回村井さん、20回二瓶さん、21回木戸さん、21回岡島さん、17回石橋さん

No.6 自己紹介20回阿部さん

No.7 自己紹介17回石橋さん

No.8 自己紹介24回柏崎さん

No.9 19回新井さん自己紹介

No.10 左から21回堀合さん、20回二瓶さん、21回岡島さん、21回木戸さん
No.11 左から17回中塩さん、24回市沢さん、17回石橋さん

No.12 左から17回中塩さん、24回市沢さん

No.13 左から17回富岡さん、17回松橋さん

No.14 左から25回東さん、24回東さん、19回赤木さん

No.15 集合写真(閉会時)
後列左から21回堀合さん、20回二瓶さん、18回村井さん、17回石橋さん、24回東さん、17回松橋さん、24回市沢さん、20回阿部さん、19回畑中さん
前列左から21回田中さん、21回岡島さん、21回木戸さん、25回東さん、17回富岡さん、17回中塩さん、19回新井さん、19回赤木さん

ここから、2次会
No.16 左から21回木戸さん、20回二瓶さん、19回新井さん、18回村井さん、21回堀合さん

No.17 左から次回幹事の21回岡島さん、21回田中さん、21回木戸さん、21回堀合さん

No.18 左から19回赤木さん、24回市沢さん、20回阿部さん、21回木戸さん、20回二瓶さん、19回新井さん

おまけ(2018年のOB会でいただいた懐かしい写真:1970年8月、田沢湖畔 国民休暇村)
1)公式サイトから、pythonをインストール(PATHにチェックを入れて)
2)py -3.8 -m venv myenv38
venv仮想環境を作成
py -3.8 -m venv myenv38
仮想環境の有効化
myenv38\Scripts\activate.bat
仮想環境でJupyter Notebook関連パッケージをインストール中、「puccinialin」という存在しないパッケージが要求されて失敗している状態です。これは近年(2025年夏時点)Jupyterやその依存モジュールのインストール時に一部ユーザーで報告されている、新しいバグ・依存関係の不整合です
python -m pip install pywinpty==2.0.10
python -m pip install “notebook==6.5.4”
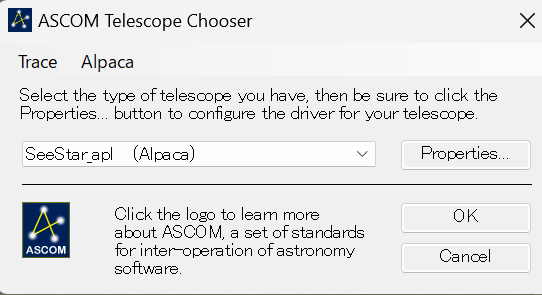
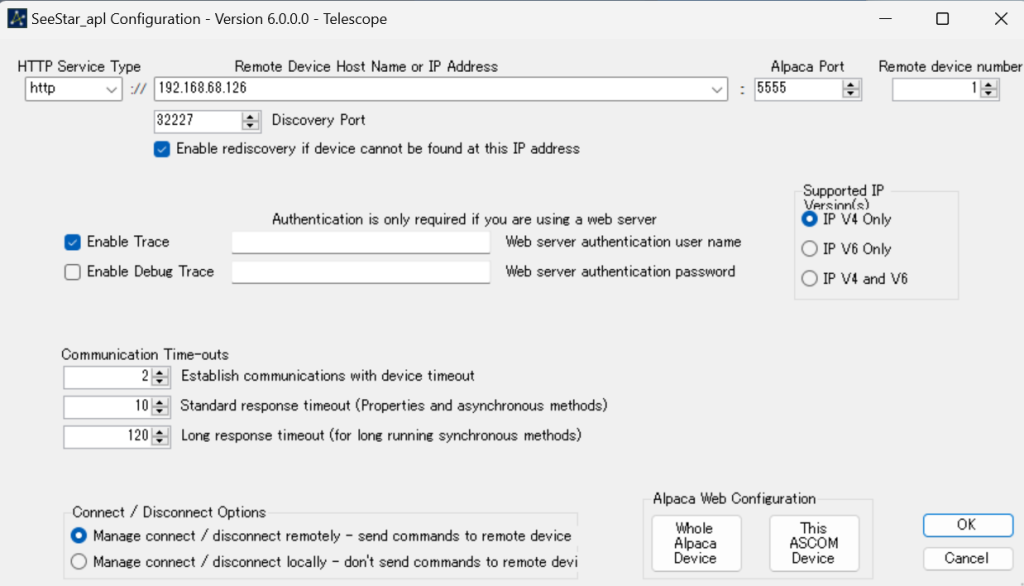
SeeStar_alp は、ASCOM Alpacaと組み合わせてSeeStarを自在に制御できる。また、標準のSeeStar APPと同時に併用できる点がすばらしい!
SeeStar_alpはサーバーとして機能し、pythomで記述されたスクリプト群であり、様々なプラットフォームで稼働できる。
https://github.com/smart-underworld/seestar_alp
Installation
Standalone package
Windows/Linux
The easiest way to install and run on Windows is to download a zip file that will allow you to run from one .exe file and everything will come up. If you want to run from source code then you will need to follow the Mac/Source install below.
Download win_seestar_alp.zip or linux_seestar_alp.zip from the lastest release tagged 1.1.0b1PullXXX at: https://github.com/rrowley42/seestar_alp/releasesSeeStar_alpをraspberry Piへインストールする専用のスクリプトが用意されている。
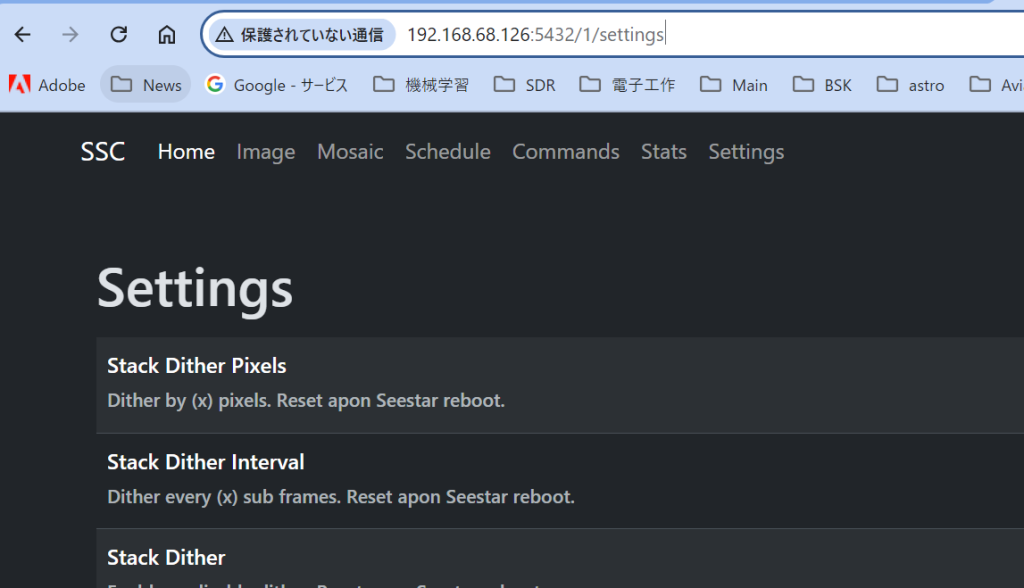
インストールが終わったら、http://SeeStar_alpのアドレス:5432/をブラウザーでアクセス。
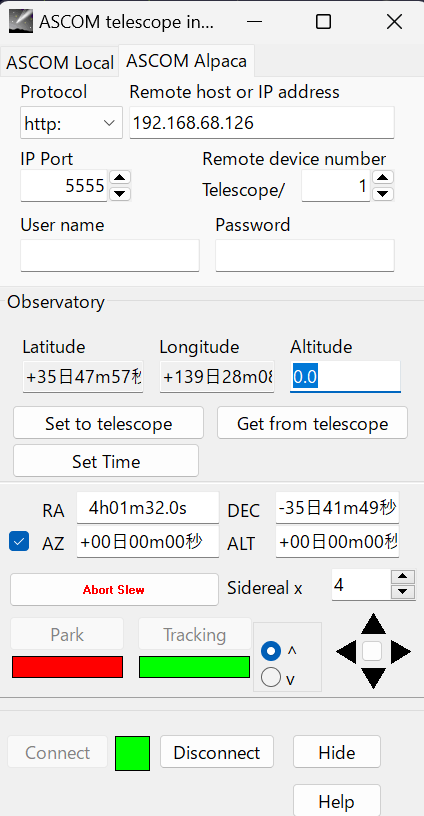
Cartes du CielでASCOM Alpaca接続の設定画面
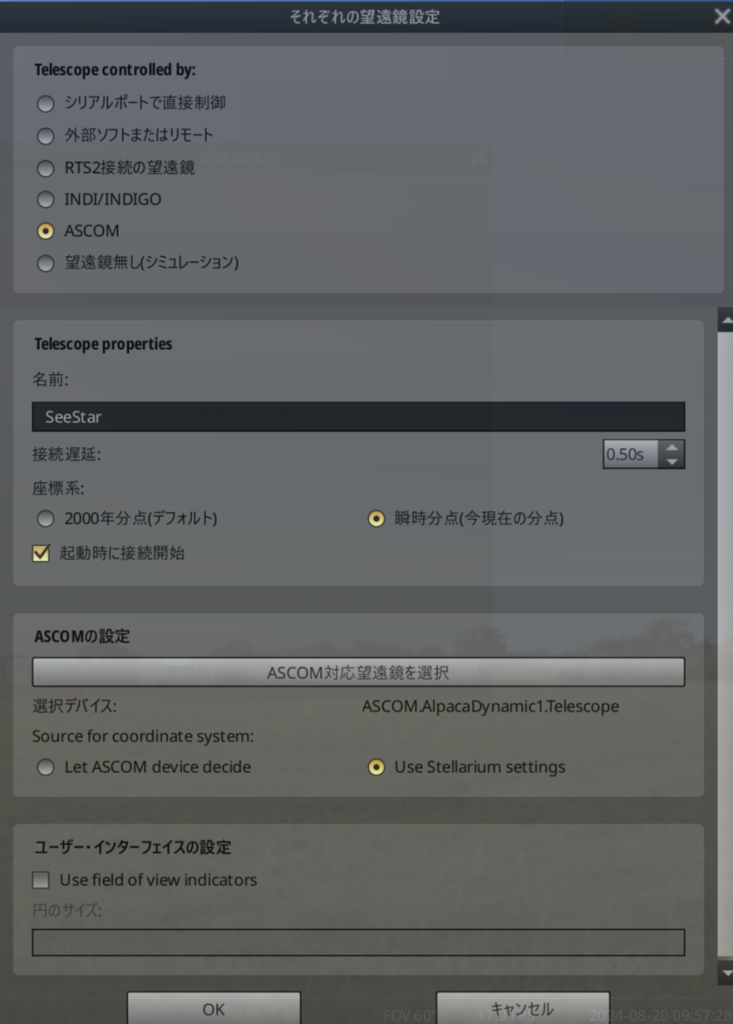
Stellariumの設定
pdfファイルをアップロードしてRAG(Retrieval-Augmented Generation)
参考動画 installの参考
https://www.youtube.com/watch?v=1xdneyn6zjw
Step 1: Install Ollama https://ollama.com/
Step 2: Copy and Paste Llama 3 install command using Terminal
Step 3: Add other LLM models (optional) https://ollama.com/library
Step 4: Install Docker https://www.docker.com/
Step 5: Install OpenWebUI https://docs.openwebui.com/getting-st...
Login to OpenWebUI and start using your local AI chatbot.
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
STEP1:ollamaの実行
C:\Users\ei2k-> ollama.exe run llama3.1
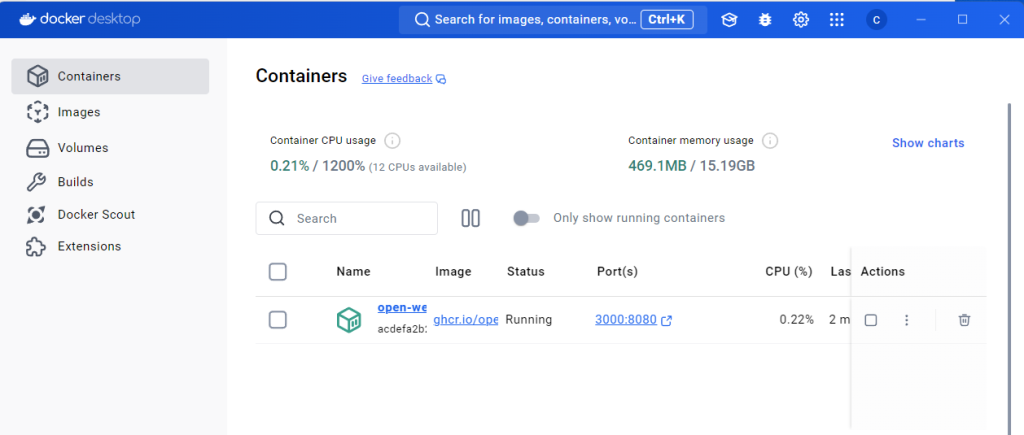
STEP2:docker desktop実行
STEP3:dockerでopen-webuiを実行
C:\Users\ei2k-> docker run -d -p 3000:8080 --add-host=host.docker.internal:host-gateway -v open-webui:/app/backend/data --name open-webui --restart always ghcr.io/open-webui/open-webui:main
出典:
https://www.perplexity.ai/search/sekiyuriteizhuan-men-jia-asan-EjFLfr6eTEC4waiY5_ZRXQ
starnetファイルの準備
https://www.starnetastro.com/download/ からコマンドラインツールをダウンロードして、実行ファイルを登録する
ーーーーーーーーーーーーーーーーーーーーーーーーー
快適星活4回目 天体画像処理ソフトSirilの紹介
https://www.youtube.com/watch?v=OEn_rVE-yw0
ZWO SEESTAR S50 DATA POST PROCESSING
Fix your broken Seestar S50 astrophotography images with Siril
Seestar S50 Siril tutorial - easy astrophotography image processing
Using Deconvolution to Improve the Resolution of Deep-Sky Images in Siril
Conversion TAB
addfiles +
ファイル一覧を選択して
add
シーケンス名を付けて、
debayerにチェックを入れて
Convert
Calibration TAB はスキップ(seestarの場合は、S50内で処理済)
Registration TAB
Global Star Alignmentの選択を確認
Align 左画面に星が赤色で囲まれる
Plot TABで整列の様子をグラフ表示
左の画像を見るには、AutoStretchを実行
不要な画像をファイルを一枚毎確認しながら除外できる(当該ファイルの行でspace key)
上のStacking(整列) をクリック
必要に応じて、クロップ(左に表示される画像をマウス操作で選択し、、)
背景の除去(Background Extraction)
一番暗い部分を選択して
生成ボタン
背景計算
グリーンノイズの除去(必要に応じて?)
画像処理(左上)
色補正
画像パラメタで、対象の星雲名を入力して、検索をクリック
見つかると、Rsolver Name の欄に名前が表示される
OKボタン
上メニュー 保存
線形モードで表示
画像処理(右上)
StarNet Star removal
prestretch linear imageにチェックを入れる
Hypabolic Stretch
Local Stretchスライダーを最大に
Stretch Parametersスライダーで調整
{ 調整は、画面を見ながら試行錯誤 }
カラーサチレーションで調整
ノイズリダクション